7. 产品功能操作说明
因为我们镜像默认设置为由ROS主控发出热点,PC端连接该热点来实现多机通信,所以下文中主机端为ROS主控端,即SSH登录后的终端,从机端为PC端虚拟机,即在虚拟机本地打开的终端。
7.1. 视觉跟随功能(B585无视觉传感器,不支持此项)

视觉跟随是实现ROS机器人对目标颜色的物体进行跟随。
在主机端运行命令行:
roslaunch simple_follower visual_follower.launch
执行完命令之后,小车开始寻找目标物体。默认情况下,小车视觉跟随目标为红色物体,小车会通过目标物体的位置进行相关计算获得运动速度,从而实现对目标物体的跟随。
7.2. 雷达跟随功能
雷达跟随功能利用激光雷达360°实时扫描特性,寻找周围可检测到的最近的物体,并对其进行跟随。
在主机端运行命令行:
roslaunch simple_follower laser_follower.launch
雷达跟随启动后,小车会不断寻找雷达扫描范围内距离最近的目标,之后找到一个距离最近且合理的目标进行跟随,最终与被跟随物保持适当的距离(即所设置的中距值),车头正对被跟随物体(即小车与被跟随物体之间夹角为0°)。
7.3. 建图功能
2D建图功能通过激光雷达来实现SLAM建图,扫描所得地图为2D平面效果。
该功能需要开启两个远程登录到主机端的终端。
在主机端运行命令行:
roslaunch turn_on_wheeltec_robot mapping.launch
可通过多种控制方式控制机器人移动完成建图,此处以ROS键盘控制方式为例:
在主机端运行命令行:
roslaunch wheeltec_robot_rc keyboard_teleop.launch
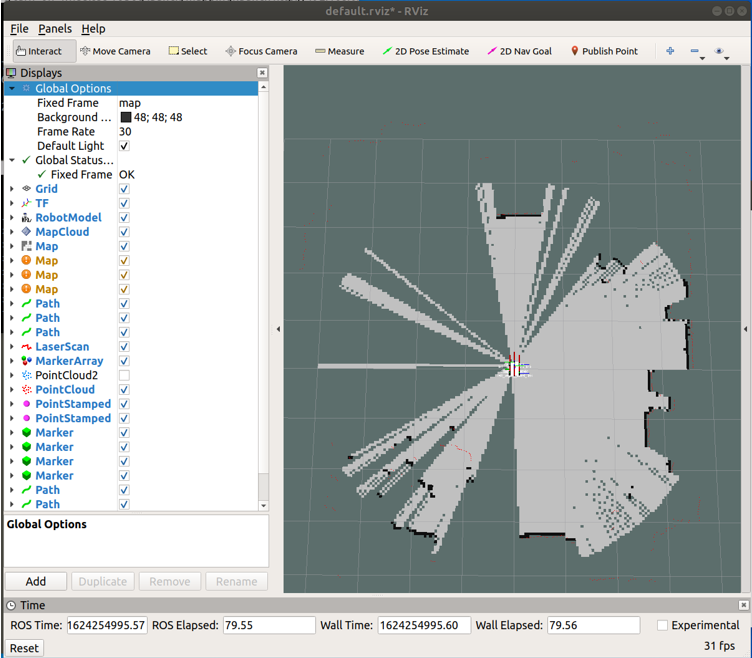
使用ROS中的可视化工具Rviz可对建图效果进行查看,
在从机端(虚拟机)运行命令行:
rviz
效果示例如下:
建图完成后,需对所建地图进行保存。
在主机端运行命令行:
roslaunch turn_on_wheeltec_robot map_saver.launch
7.4. 导航功能
2D导航功能通过激光雷达来实现SLAM导航,使用2D建图功能所保存地图来进行。
在主机端运行命令行:
roslaunch turn_on_wheeltec_robot navigation.launch
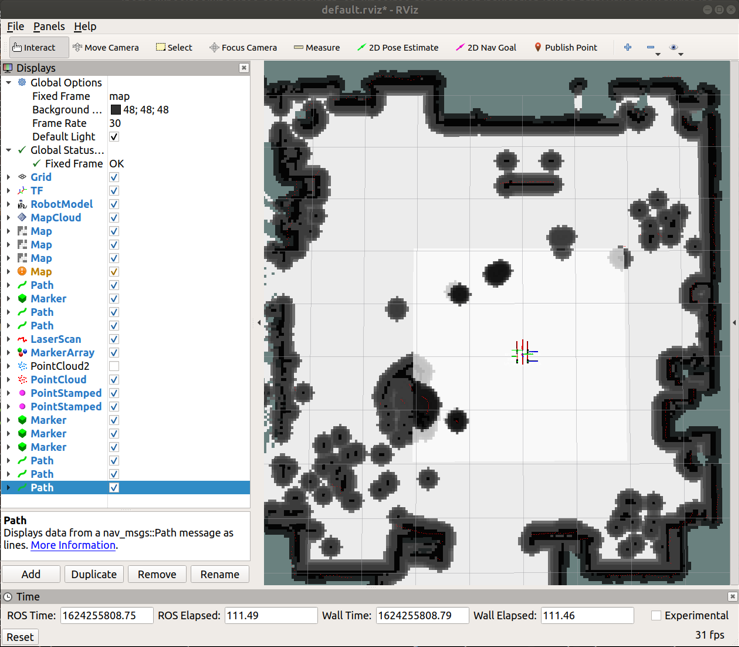
同样使用ROS中的可视化工具Rviz对导航效果进行查看,
在从机端(虚拟机)运行命令行:
rviz
效果示例如下:
导航模式有两种:
一种是单点导航,点击rviz上方2D Nav Goal按键,然后在地图中选定导航点与方向,单击鼠标确定导航目标点位置,并且不要松开,继续拖动选择导航目标方向,确定后松手,小车就会运动到所指定的目标点,在运行rviz的终端也会显示目标点的坐标;
另一种是多点导航,点击rviz界面上方的Publish Point设置用于多点导航的点,当设置多个点时,小车会在这几个点之间往复运动,注意使用Publish Point工具进行多点导航时,所设置的导航点默认方向都是小车的初始车头方向。