10. 网络连接与静态IP配置
通常我们使用由ROS主控发出热点,PC端连接该热点的方式来实现多机通信的,即ROS主控作为主机,PC端作为从机。若要实现多机通信,就需要先进行网络连接设置与静态IP配置。
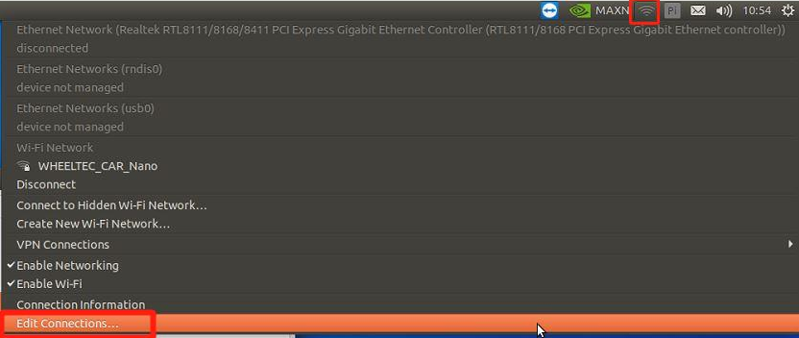
首先将机器人产品连接显示屏,在右上方找到WiFi图标,点击Edit Connection
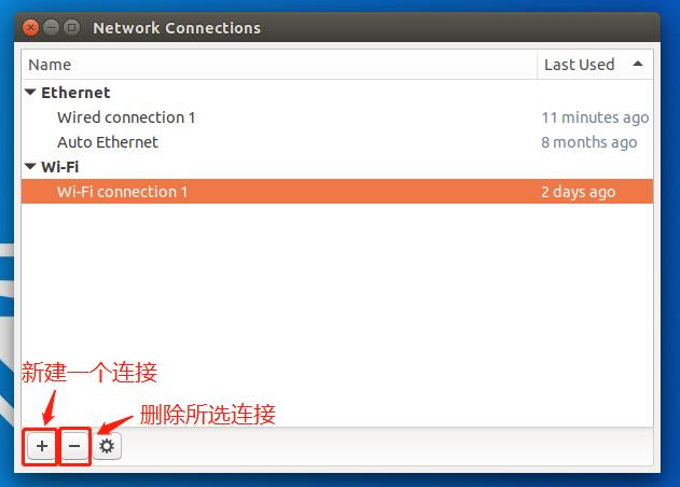
点击左下角加号新建一个连接(另外,可以选中任一连接后点击减号,以删除所选连接,留下用户自己所需的连接)
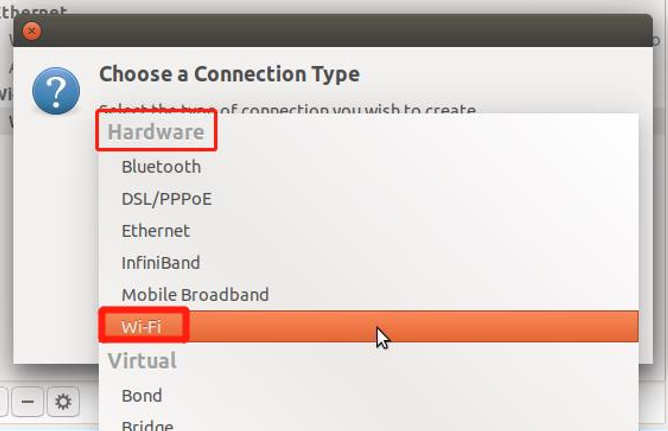
新建连接类型选择WiFi
首先是WiFi选项卡,在SSID处设置WiFi名称,Mode处选择Hotspot创建热点
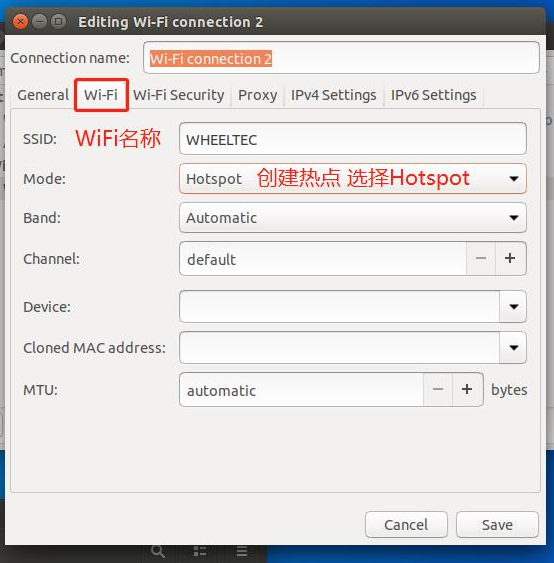
WiFi安全性选项卡中主要是设置加密类型和密码,用户可以自行选择,通常选用WPA&WPA2类型

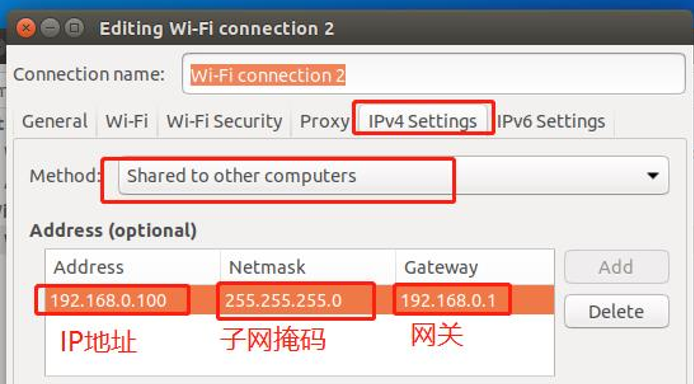
IPv4选项卡主要是IP地址的设置,这里就是我们固定IP地址的地方,依次输入要设置的IP地址、子网掩码和网关
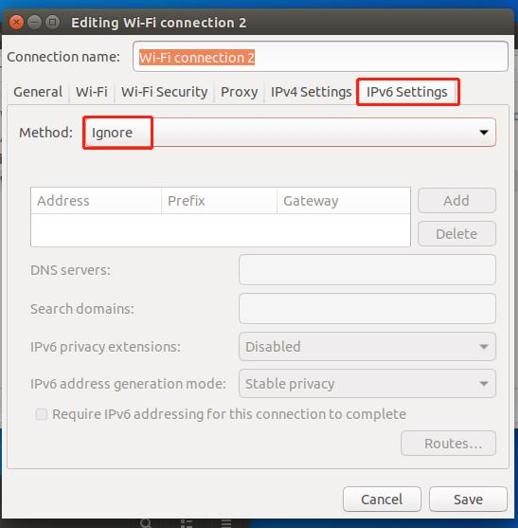
IPv6地址选择忽略后电机右下方保存,热点就创建完毕了
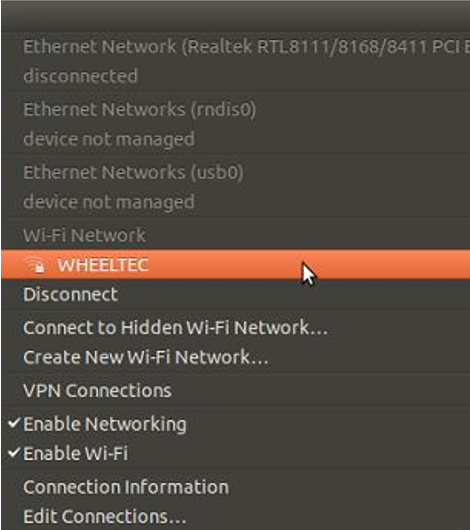
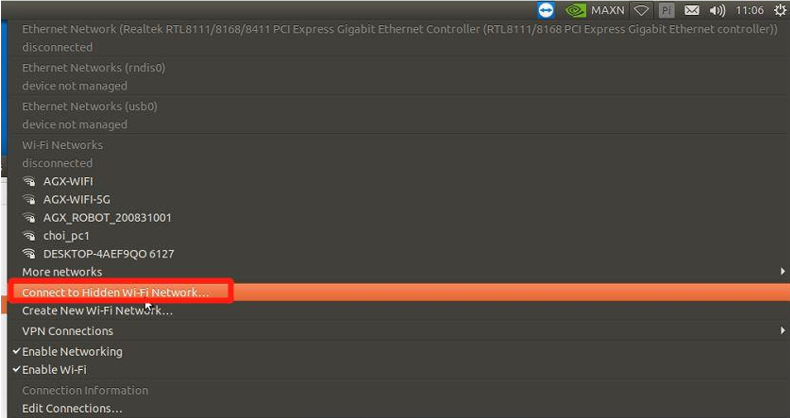
若想要切换到我们刚刚所创建的热点,依旧点击右上方WiFi图标,选择Disconnect
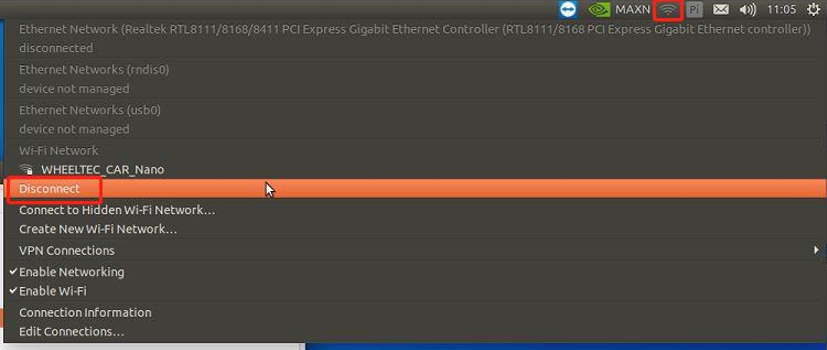
再点击connect to hidden Wi-Fi network
在connection处选择要连接的连接名,注意此处选择的不是WiFi名,是在刚刚创建窗口中最上方的connection name
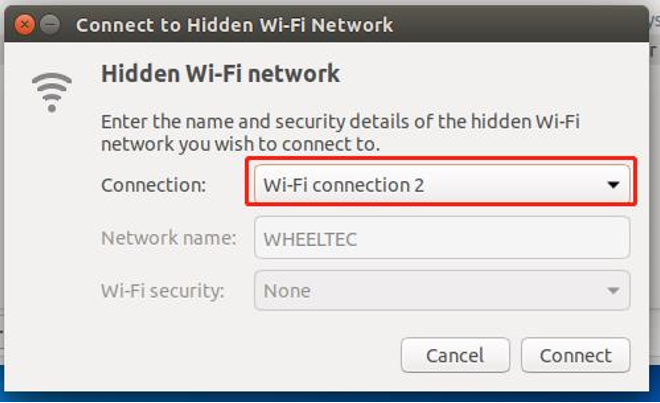
点击连接后重新点击WiFi图标,可以看到已经连接到了刚刚所创建的热点